Mekanik denge durumu
Mekanik denge, bir parçacığın, katı cisimin ya da bir dinamik sisteminin momentumunun korunmuş olduğuğu durumdur. Genelde çizgisel durumu ifade eder. Örneğin, çizgisel mekanik denge, objeye etki eden net kuvvet sıfır iken sistemin çizgisel momentumunun korunduğu bir durum olabilir. Çizgisel momentumun sıfır ve korunmuş olduğu bu özel durumda, sistem statik dengededir. Herhangi bir sistem için çizgisel momentum korunmuş olsa bile, eylemli referans sistemini (objeye ilişkin olan sabitliliği) değiştirmek mümkün olabilir.
Dönen mekanik denge durumunda ise objenin açısal momentumu korunur ve net tork sıfıra eşit olur. Daha genel olarak, korunan sistemlerde, potansiyel enerjinin sıfır olduğu, genelleştirilmiş koordinatlara göre konfigürasyon uzaydaki herhangi bir noktada denge kurulur.
Kararlılık



Mekanik denge durumunda olan bir sistemin önemli bir özelliği ise kararlılıktır. Basit kalkülüste, mekanik denge durumunda olan bir sistemin, potansiyel enerjisinin birinci türevi olduğu yerde kritik nokta sıfıra eşittir. Sistemin denge durumunun kararlı ya da kararsız olduğunu belirlemek amacıyla ikinci türevinin alınması gerekir.
- İkinci türev < 0 : Potansiyel enerji lokal maksimumdadır. Anlamı şudur ki, sistem karasız denge durumundadır. Eğer sistem gelişigüzel bir şekilde denge konumundan küçük bir miktar kadar bile uzaklaşsa, sisteme etki eden kuvvetler sistemi daha uzak bir noktaya taşıyacaktır.
- İkinci türev > 0 : Potansiyel enerji lokal minimumdadır ve bu denge durumudur. Dengenin bozulmasına karşılık olarak dengeyi tekrar korumaya yatkın olan kuvvetler ortaya çıkar. Eğer bir sistem için birden fazla kararlı denge durumu mümkün olursa, dengenin, mutlak minimum değerinden daha yüksek olan potansiye enerjisi yarıkararlı denge durumunu gösterir.
- ikinci türev = 0 ya da yok : Kararlılık durumu nötrdür. Sistemin dengelilik durumunun kesinliğini incelemek adına öncelikte yüksek dereceli türev incelenmelidir. Eğer en düşük derceli ve sıfıra eşit olmayan türev negatif ya da tek sayı olan bir değere sahip ise dengelilik durumu kararsızdır; eğer, en düşük derceli ve sıfıra eşit olmayan türev hem çift hem de pozitif bir değere sahip ise dengelilik durumu kararlıdır ve eğer bütün yüksek dereceli türevleri sıfıra eşit ise dengelilik durumu nötrdür. Nötr kararlılık durumunda enerji değişiklik göstermez ve dengelilik sonu olan bir genişliğe sahiptir ve bu bazen çok az miktarda bir kararlılık ya da başabaşlık durumu olarak adlandırılır.
Birden fazla boyut hesaba katıldığında, farklı doğrultularda farklı sonuçlar almak mümkündür. Örneğin, x-doğrultusunda alınan yer değişikliğine bağlı olarak kararlılık söz konusu olsa bile y-doğrultusunda kararlılık söz konusu olmayabilir ve buna eyerlik noktası denir. Bir sistemin dengede olabilmesi için bütün eksenlerdeki bütün doğrultularda kararlılığın geçerli olması gerekir aksi takdirde sistem dengede değildir.
Örnekler
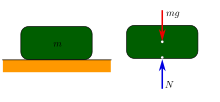
Hareketsiz olarak durmakta olan sabit bir cismin mekanik denge durumu özel bir durumdur ve buna statik (hareketsiz) denge durumu denir. Sıranın üzerine konulan kağıt ağırlığı hareketsiz denge durumuna bir örnektir. Homojen ve konveks cisimlerin yatay bir düzlemde yer çekimi etkisi altındaki statik denge durumlarının minimum değeri bilimin özel ilgi alanlarındandır. Bu durumda bir obje sadece bir kararlı ve bir kararsız denge noktasına sahip olduğunda üç boyutta 4 tane minimum değere sahip olur ve buna gomboc/gömböc denir. Bir .ocuk salıncakta sabit hızla sallandığında mekanik denge durumuna erişirken, statik denge durumuna erişemez.(Salıncağın referans noktasına göre)
Mekanik dengeye örnek olarak yayı sıkıştıran bir insan örnek verilebilir. Kişi, yayı bir noktaya doğru sıkıştırdığında, yayı sıkıştırmaya çalışan ve yayın da bu sıkıştırma kuvvetine eşit olarak şekilde tepki gösterdiği bir statik durum oluşur ve bu yüzden yayı sıkıştıran kişi, yayı daha fazla sıkıştıramayacaktır. Bu durumda yay, mekanik denge durumuna erişmiştir.
Ayrıca bakınız
- Statik
- Dinamik denge
- Mühendislik mekaniği
- Orta kararlılık durumu
Notlar ve Kaynakça
- John L Synge & Byron A Griffith (1949). Principles of Mechanics (2nd ed.). McGraw-Hill. pp. 45–46.
- Beer FP, Johnston ER, Mazurek DF, Cornell PJ, and Eisenberg, ER. (2009) Vector Mechanics for Engineers: Statics and Dymanics. 9th ed. McGraw-Hill. p 158.
- Herbert Charles Corben & Philip Stehle (1994). Classical Mechanics (Reprint of 1960 second ed.). Courier Dover Publications. p. 113. ISBN 0-486-68063-0
- Lakshmana C. Rao, J. Lakshminarasimhan, Raju Sethuraman, Srinivasan M. Sivakumar (2004). Engineering Mechanics. PHI Learning Pvt. Ltd. p. 6. ISBN 81-203-2189-8.
- https://en.wikipedia.org/wiki/Mechanical_equilibrium
İleri Okuma
- Marion JB and Thornton ST. (1995) Classical Dynamics of Particles and Systems. Fourth Edition, Harcourt Brace & Company