GPS


GPS (Global Positioning System; Küresel Konumlama Sistemi), Dünya üzerinde herhangi engelsiz bir görüş hattında, dört veya daha fazla uydusu ile her türlü hava koşulunda yer ve zaman bilgileri sağlayan uzay tabanlı uydu navigasyon sistemidir.[1] Düzenli olarak kodlanmış bilgi yollayan bir uydu ağıdır ve uydularla arasındaki mesafeyi ölçerek Dünya üzerindeki kesin yeri tespit etmeyi mümkün kılar. Küresel ölçekte çalışır bu tür sistemlerin öncülüdür. Bu sistem, Amerika Birleşik Devletleri Savunma Bakanlığı'na ait, yörüngelerinde sürekli olarak ilerleyen uydulardan oluşur. Savunma Bakanlığı tarafından desteklenen sistem, bir GPS alıcısı ile kullanılacak şekilde herkes tarafından erişilebilirdir. Uydular bir tür radyo sinyali yayarlar ve yeryüzündeki GPS alıcıları bu sinyalleri alıp yorumlayarak konum belirlenmesini gerçekleştirir.
GPS projesi, öncelindeki navigasyon sistemlerinin kısıtlı işlevselliklerini aşabilmek amacıyla[2] 1960'lardan gelen bir dizi gizli mühendislik çalışması da dahil olmak üzere ilk denemelerde ortaya çıkan birkaç görüşün de bütünleştirilmesi ile, 1973 yılında geliştirilmişti. GPS, ABD Savunma Bakanlığı (DoD) tarafından esas olarak 24 uydu ile çalışacak şekilde tasarlanıp yapılmış ve devreye alınmıştı. 1994 yılında tam olarak işler hale gelmiştir. Sistem, Bradford Parkinson, Roger L. Easton ve Ivan A. Getting'in icatları ile güçlendirildi.
GPS sistemi, var olan sistem üzerinde teknoloji ilerlemeleriyle ve yeni taleplerle artık yenileştirilme ve Yeni Nesil Operasyonel Kontrol Sistemi (OCX) destekli, gelişmiş GPS III uydularının hayata geçirilmesi çabalarına yol açmıştır.[3] Beyaz Saray ve Başkan Yardımcısı Al Gore 1998 yılında duyurular ile bu değişimi başlattı. 2000 yılından beri, GPS III yenileştirilmeleriyle ilgili kararlarda ABD Kongresi yetkilidir.
Ek olarak diğer sistemlerin kullanımında GPS geliştirilme aşamasındadır. Rus navigasyon sistemi GLONASS, GPS ile birlikte çağıldaşı olarak geliştirilmektedir; ama O, 2000'li yılların ortalarına kadar dünyayı tam olarak kapsamadan çalışmıştır.[4] GPS'in yanı sıra AB tarafından geliştirilen Galileo, Çin tarafından geliştirilen Compass ve Hindistan tarafından geliştirilen IRNSS adlı konumlandırma sistemleri de vardır.
Tarihi
GPS sistemi ilk askeri gereksinimler için tasarlanmıştı. Tasarımı kısmen 1940'lı yılların başlarında geliştirilen, İkinci Dünya Savaşı sırasında kullanılan ve daha sonra da uzun süre kullanılmış o dönem için bir çözüm olan LORAN (LORAN - Long Range Navigation) ve Decca Gezgini gibi benzer yer tabanlı radyo-seyir sistemlerine dayanmaktadır. GPS'in ilk kullanımı İkinci Dünya Savaşı'nın hemen sonrasına dayanır. Sistem, sinyal alıcıları ile yön bulmakta, askeri planlarda ve konum hesaplamalarında ve güdümlü roketlerin kontrolünde kullanılmak üzere tasarlanmıştı. GPS sistemi, ancak 1980'lerde sivil kullanıma açılmıştır.
Önceli
| |
 | |
| NAVSTAR GPS resmi belirtkesi |
ABD Hv. K. 50. Uzay Kanatları belirtkesi |
1956 yılında, Alman-Amerikan fizikçi Friedwardt Winterberg[5] yapay uydular içinde yörüngeye yerleştirilen hassas atom saatleri kullanılarak genel görelilik denemesi (güçlü bir yerçekimi alanındaki yavaşlayan süre için) önerdi. Genel görelilik kullanılmaksızın, yörüngede günde 38 mikrosaniye daha hızlı bir şekilde süre düzeltmesi çalıştırmak için GPS brüt arızalanmasına yol açardı.[6] Sovyetler Birliği 1957 yılında ilk insan yapımı peyk olan Sputnik'i fırlattı; bu, GPS için ilave bir esin kaynağı oldu. İki Amerikan fizikçi, William Guier ve George Weiffenbach, Johns Hopkins'in Uygulamalı Fizik Laboratuvarı'nda (APL), Sputnik'in radyo sinyali iletimlerinin izlenmesine karar verdi.[7] Doppler etkisi nedeniyle peykin, yörünge boyunca nerede olunduğunun bilgisini içindeki saatleri ile kesin olarak verebileceğini fark etti. APL Müdürü onlara gereken yoğun hesaplamaları yapmak için kendi UNIVAC bilgisayarına verileri giriş iznini verdi. Bir sonraki bahar, Frank McClure, APL müdür yardımcısı, Guier ve Weiffenbach'a, verilen ters problemi araştırmak için bu uydunun kullanıcının yerini saptamasını sordu. Bu, (denizaltıdan-fırlatılan Polaris füzesini geliştiren Donanma'nın, denizaltı konumunu bilebilmesi için gerekliydi.) onların ve APL'nin Transit sistemini geliştirmesine yol açtı.[8] 1959 yılında, ARPA'da (adı 1972 yılında DARPA olarak değiştirildi) Transit sisteminin geliştiriminde rol aldı.[9][10][11]
Amerika Birleşik Devletleri Deniz Kuvvetleri tarafından kullanılan ilk uydu navigasyon sistemi, Transit, 1960 yılında başarıyla test edildi.[12] Yaklaşık saatte bir seyir düzeltmesi sağlayabilir bir uydu takımında (satellite constellation) beş uydu kullanıldı. 1967 yılında, ABD Deniz Kuvvetleri, GPS sisteminde gerekli bir teknoloji olarak uzay şartlarında, yüksek doğruluklu saat ölçümü için Timation uydusunu geliştirerek yeteneğini kanıtladı. 1970'lerde, yer tabanlı Omega Navigasyon Sistemi, faz karşılaştırmasına dayanarak istasyon çiftlerinden sinyalin aktarımı ile dünya çapında ilk telsiz konumlandırma sistemi olmuştur.[13] Bu sistemlerin sınırlandırılmaları daha fazla doğruluk ile daha evrensel bir navigasyon çözümüne ihtiyacı sürdürdü.
Geliştirilme eylemlerinin hemen hemen hiçbiri uydu takımının milyarlarca dolara mal olacak araştırmalarda, askeri ve sivil işkollarındaki doğru konumlandırma için kapsamlı ihtiyaçların temininde bir gerekçe olarak görülmedi. ABD Kongresi'nin bu harcamaları, Soğuk Savaşın silahlanma yarışı sırasında, ABD'nin varlığına nükleer bir tehdit görünümü gibi haklı bir ihtiyaca yönelik olarak yaptığı düşüncesini oluşturdu. Bu nedenle caydırıcı etkisi görülerek gizlice GPS finanse edildi. Ayrıca bu, o dönemdeki aşırı dereceli gizlilik nedeniylede dir. Nükleer üçlüsü, ABD Hava Kuvvetleri'nin stratejik bombardıman uçakları ile birlikte kıtalararası balistik füzeler (ICBM) ve ABD Donanması'na ait denizaltıdan fırlatılan balistik füzelerden (SLBM) oluşuyordu. Nükleer caydırıcılık duruşu için hayati önem arz eden, SLBM fırlatma konumunun doğru belirlenmesi bir kuvvet çarpanı olmuştur.
ABD'nin balistik füze taşıyan denizaltı konumlarının hassas biçimde hesaplanması için yüksek doğruluklu konum belirleme gereksinimi doğdu.[14] Nükleer üçlüden ikisi için ABD Hava Kuvvetleri'nin, aynı zamanda daha doğru ve güvenilir bir navigasyon sistemine gereksinimi vardı. Paralelinde Deniz ve Hava Kuvvetleri'nde, temelde aynı tür sorunların çözümü için ne yapılabileceği ile ilgili, kendi teknolojileri geliştirilmekte idi. ICBM'lerin beka kabiliyetlerini arttırmak için, taşınabilir fırlatma platformları kullanmak gibi (Rus SS-24 ve SS-25 sistemlerindeki gibi) öneriler vardı ve bu yüzden SLBM durumundaki gibi benzer fırlatma konumunu düzeltme ihtiyaçları oluştu.
1960 yılında, Hava Kuvvetleri aslında 3 boyutlu konum hesaplamaya imkan veren bir LORAN olan MOSAIC (MObile System for Accurate ICBM Control) adlı bir radyo-navigasyon sistemi önerdi. Takiben Proje-57 üzerinde çalışmalar başladı; 1963 yılında bu sistem denendi ve bu çalışmadan sonra GPS kavramı doğdu. Devamında aynı yıl GPS'te şimdi gördüğünüz özelliklerin birçoğunun ilk tasarılarını barındıran Proje 621B çalışmalarına yönelindi;[15] hem ICBM'ler hem de Hava Kuvvetleri bombardıman uçaklarına gereken hassas konum hesaplamaları için çözümler üretilmeye başlandı.[16] Deniz Kuvvetleri Transit sisteminin güncellemeleri Hava Kuvvetleri operasyonlarının yüksek hızları için çok yavaş kalmaktaydı. Deniz Araştırma Laboratuvarı'nın kendi sisteminin geliştirmeleri devam ederken, ilk kez 1967 yılında ve üçüncüsü 1974 yılında fırlatılmak üzere, içinde atom saati bulunan uzaydaki ilk araç olan Timation (Time Navigation) uydusu yörüngeye oturtuldu.[17]
GPS, ABD ordusunun bir diğer önemli, farklı bir dalı haline geliyordu. 1964 yılında, ABD ordusunun, jeodezi ölçümlerinde kullanılacak SECOR (Sequential Collation of Range) jeodezi yer uydusu yörüngede ilk turuna çıktı.[18] Henüz belirlenmeyen bir konumunda iken karada üslenen dördüncü bir istasyondan, tam olarak konumu düzeltmek için daha sonra bu sinyalleri kullanabilirdi. Son SECOR uydusu (SECOR 13) 1969 yılında fırlatıldı.[19] Onyıllar sonra ilk yıllarında GPS, sivil yer araştırması için yeni teknolojilerinden sürekli olarak yararlanılabilen ilk sahalardan biri haline geldi. Çünkü sivil yer araştırması bilirkişilerine (surveyors) yarayan GPS uydu takımıdan gelen daha eksiksiz sinyaller, yıllar önce operasyonel ilan edilmişti. GPS sisteminin, yer tabanlı vericileri yörüngeye taşınan, SECOR sisteminin evrim geçirmiş bir türü olduğu düşünülebilir.
Geliştirme
1960'larda, paralelindeki gelişmelerle; Transit, Timation, 621B kodlu proje ve SECOR gibi bir dizi çoklu hizmet programından en iyi teknolojileri sentezleyerek üstün bir sistem geliştirilebileceği anlaşıldı.
1973 yılında hafta sonu, İşçi Bayramı boyunca, Pentagon'daki yaklaşık 12 askeri yetkili tarafından Savunma Navigasyon Uydu Sistemi (DNSS) konusunu işleyen bir dizi toplantı kararı alındı. Bu toplantıda, "GPS sisteminin oluşturulması yolunda gerçek bir sentez" yapılmıştır. Daha sonra O yıl, DNSS programı, Navstar veya Navigation System Using Timing and Ranging (Zamanlama Kullanımı ve Menzilleme Navigasyon Sistemi) adını almıştır.[20] Navstar ile ilişkili olan özgün uyduların adı (önceki Transit ve Timation adlandırmaları gibi), Navstar uydu takımını tanımlamak için daha kapsamlı bir tam ad olarak Navstar-GPS şeklinde ve daha sonra da sadece kısaltılmış biçimde GPS olarak söylenegelmiştir.[21]
Kore Hava Yolları'na ait 007 uçuş numararalı, 269 kişi taşıyan bir Boeing 747, SSCB'nin yasak hava sahası içine[22] sapması sonrasında Sahalin ve Moneron Adaları dolaylarında 1983 yılında düşürülmüştü. ABD Başkanı Reagan, yeterli derecede geliştirilmiş olan, GPS sisteminin sivilde, serbest bir şekilde kullanılabilir olması için bir yönerge yayınlattı.[23] İlk uydu 1989 yılında fırlatıldı ve 24. uydu 1994 yılında fırlatıldı. Roger L. Easton GPS birincil mucidi olarak yaygın bir şekilde yansıtılır.
{kind=link}
Başlangıçta en yüksek kalitede sinyal, askeri kullanım için ayrılmıştı ve sivil kullanıma hazır olacak olan sinyal bilerek bozulmuş oldu (Selective Availability). Bu, seçici durumun kapatılabilir olması için 100 metreden (330 ft) 20 metreye (66 ft) sivil GPS sinyallerinin hassas iyileştirilmesi, Başkan Bill Clinton'ın siparişi ile 1 Mayıs 2000'de gece yarısı değişti. 2000 yılında seçici durumu kapatmak için 1996 yılında imzalanan talimat ABD Savunma Bakanı William Perry tarafından önerilmişti; çünkü diferansiyel GPS hizmetlerinin yaygın büyümesi için sivil doğruluğunu geliştirmek ve ABD askeri kazanımlarını ortadan kaldırmak gerekmekteydi. Dahası ABD ordusunun etkin bölgesel düzeyde muhtemel düşmanları için GPS hizmetini kullanımı bırakmayı destekleyebilecek teknolojileri gelişiyordu.[24]
2000'li yıllarda ABD, GPS hizmetinde sivil kullanım için yeni sinyaller ve tüm kullanıcılar için artan doğruluk ve bütünlük de dahil olmak üzere, mevcut GPS donanımları ile tamamının uyumluluğunu korurken, çeşitli iyileştirmeleri uygulamaya geçirmiştir.[25] Sistemin yenileştirmeleri şimdi, artan askeri, sivil ve ticari ihtiyaçları karşılamak, dolayısıyla yeni yetenekleri ile Küresel Konumlama Sistemini yükseltmek için devam eden bir girişim haline gelmiştir. Program GPS Blok III ve Yeni Nesil Operasyonel Kontrol Sistemi (OCX) dahil olmak üzere uydu satın almalar gibi bir dizi girişim şekliyle uygulanmaktadır. ABD Hükümeti GPS sisteminin verimini ve doğruluğunu arttırmak için uzay ve yer bölümlerini geliştirmeye devam etmektedir.
GPS, ABD Hükümeti'nin sahip olduğu ve işlettiği ulusal bir kaynaktır. Savunma Bakanlığı (DoD) GPS resmi temsilcisi olmaktadır. Kurumlararası GPS İcra Kurulu (IGEB - Interagency GPS Executive Board) 1996 ile 2004 yılları arası GPS politikalarını yönetti. Daha sonra 2004 yılında bu Uzay-Tabanlı Konumlandırma, Seyir ve Zamanlama Ulusal Yürütme Kurulu (Navigation and Timing Executive Committee), GPS ve ilişkin sistemler ile ilgili konularda federal daireler ve kurumlara danışmanlık hizmeti vermek ve onları yönlendirmek için yönerge ile kurulmuştur.[26] İcra kuruluna savunma ve ulaşım vekil sekreterleri ortaklaşa başkanlık etmektedir. Üyeleri eşdeğer düzeyde, devlet ve ticaret bakanlıklarından yetkililer ve ülke güvenliği kadrolarının ortak şefleri ve NASA'dan dır. İcra kurulunun bileşenleri, yürütme ofisinin gözlemcileri ve irtibatlı olarak katılan FCC (Federal İletişim Kurulu) başkanıdır.
Savunma Bakanlığı (DoD), "Standart Konumlama Servisi"ni korumak için yasa gereği (federal radyoseyrüsefer planı ve standart konumlama hizmeti sinyal şartnamesinde tanımlandığı gibi) var olacaktır. GPS sisteminin dünya çapında sürekli geçerli halde olması; "ve" onu haksız yere bozan ya da sekteye uğratıcı sivil bir kullanım olmadan, onun güçlendirilmesine dair düşmanca kullanımları ortadan kaldırmak için önlemler geliştirecektir.
Süreç ve yenileştirme
| Blok | Fırlatılma | Uydu durumu | Yörüng. ve işler | |||
|---|---|---|---|---|---|---|
| Başa- rılı( | Başa- rısız( | Yapım | Tasarı | |||
| I | 1978–1985 | 10 | 1 | 0 | 0 | 0 |
| II | 1989–1990 | 9 | 0 | 0 | 0 | 0 |
| IIA | 1990–1997 | 19 | 0 | 0 | 0 | 9 |
| IIR | 1997–2004 | 12 | 1 | 0 | 0 | 12 |
| IIR-M | 2005–2009 | 8 | 0 | 0 | 0 | 7 |
| IIF | 2010 sonrası | 3 | 0 | 10 | 0 | 3 |
| IIIA | 2014 sonrası | 0 | 0 | 0 | 12 | 0 |
| IIIB | — | 0 | 0 | 0 | 8 | 0 |
| IIIC | — | 0 | 0 | 0 | 16 | 0 |
| Toplam | 61 | 2 | 10 | 36 | 31 | |
| (Son güncelleme: 8 Ekim 2012) Blok IIR-M PRN 01 sağlıksız | ||||||
- 1972 yılında, ABD Hava Kuvvetleri Ataletsel Kılavuz Merkezi Test Tesisi'nde (Holloman Hv. K. Üssü), yer tabanlı sözde uyduları kullanılarak White Sands Füze Menzili üzerinden GPS alıcılarının iki prototip geliştirimi için uçuş testleri yapılmıştır.
- 1978 yılında, ilk deneyim olarak Blok-I GPS uydusu fırlatıldı.
- 1983 yılında, seyir hataları sonucu Sovyet yasak hava sahası içine sapmış Kore Hava Yolları (KAL 007) uçağı bir Sovyet avcı uçağı tarafından düşürüldü. 269 kişinin yaşamını yitirdiği kaza sonrasında, daha önce bu Navigation Magazine yayınında yayınlanmış olmasına rağmen, ABD Başkanı Ronald Reagan'ın GPS sisteminin sivil kullanımlar için hazır olacağını açıklaması ile sivil kullanıma geçilmiştir.
- 1985 yılında, on kadar daha deneysel Blok-I uydusu, GPS kavramının oturması için fırlatılmıştı. Bu uyduların Komuta ve kontrolü, Kaliforniya Onizuka Hv. K. Üssü ve Colorado Springs Kolorado Falcon Hv. K. Üssü'nde (Schriever AFB) yer alan 2. Uydu Kontrol Filosu'na (2SCS) devredilmişti.
- 14 Şubat 1989 tarihinde, ilk çağdaş Blok-II uydusu fırlatıldı.
- 1990 ve 1991 yılları arasındaki Körfez Savaşı, GPS teknolojilerinin yaygın olarak kullanıldığı ilk çatışma olmuştur.
- 1992 yılında, Hv. K. 50. Uzay Kanatları (Space Wing) tarafından yönetilmekte olan ilk sistemin yönetimi yerini 2. Uzay Kanatları (2ndSW) yönetimine bıraktı.
- Aralık 1993 itibariyle, GPS'nin tüm uydu takımı (24 uydu) gösteren kullanılabilir ve Standart Konumlama Hizmeti (SPS - Standard Positioning Service) sağlayan, ilk operasyonel yeteneği (IOC) elde etti.
- Tam Operasyonel Kabiliyeti (FOC) ordunun güvenli Hassas Konumlandırma Hizmetinin (PPS) tam kullanılabilirliğini gösteren, Nisan 1995 yılında Hava Kuvvetleri Uzay Komutanlığı (AFSPC) tarafından ilan edildi.
- 1996 yılında, sivil kullanıcılara GPS önemini bildiren yönerge yanı sıra askeri kullanıcılara da, ABD Başkanı Bill Clinton tarafından bir politika yönergesi[29] yayınlandı, çift kullanımlı sistem olarak GPS ilânı ve onu ulusal olarak yönetmek için bir Kurumlararası GPS Yürütme Kurulu oluşturulmasına karar verildi.
- 1998 yılında, Amerika Birleşik Devletleri Başkan Yardımcısı Al Gore, GPS III olarak atfedilen özellikle Amerika Birleşik Devletleri Kongresi'nde çaba ile yetkili havacılık güvenliği ile ilgili ve 2000 yılında, gelişmiş kullanıcı doğruluğu ve güvenilirliği için iki yeni sivil sinyalin iletimi hakkında GPS'i yükseltmek için plânlarını açıkladı.
- 2 Mayıs 2000 tarihinde "Seçici Kullanılabilirlik" olarak bilinen durum kullanıcıların küresel olmayan bozulmuş sinyali alması için gereken izin, 1996'da yönetimin düzenlemesi sonucu kesildi.
- 2004 yılında, Amerika Birleşik Devletleri Hükümeti GPS ve Avrupa'nın planlanan Galileo sistemiyle ilgili Avrupa Topluluğu'nda işbirliği ile bir anlaşma imzaladı.
- 2004 yılında, Amerika Birleşik Devletleri Başkanı George W. Bush tarafından, ulusal politika olarak güncellenen ve Uzay-Tabanlı konumlama ve Zamanlama için Ulusal Yürütme Komitesi ile yönetim kurulu yerini aldı.[30]
- Kasım 2004'te, Qualcomm cep telefonları için yardımlı GPS'in başarılı denemelerini açıkladı.[31]
- 2005 yılında, ilk çağdaş GPS uydusu fırlatıldı ve geliştirilmiş kullanıcı verimi için ikinci bir sivil sinyali (L2C) yayını başladı.[32]
- 14 Eylül 2007 tarihinde, yaşlanan ana bilgisayar tabanlı Yer Segmenti Kontrol Sistemi (mainframe-based Ground Segment Control System) yeni Mimarisinin Evrimi Plânı transfer edildi.[33]
- 19 Mayıs 2009 tarihinde, Amerika Birleşik Devletleri Sayıştayı bazı GPS uydularının kısa sürede 2010'a kadar başarısız olabileceğini bildiren bir rapor yayınladı.[34]
- 21 Mayıs 2009 tarihinde, Hava Kuvvetleri Uzay Komutanlığı GPS yetersizliği korkularını iyileştirmeleri hakkında "bizim verim standartını aşan durumlarda desteğimiz devam etmeyecek, sadece küçük bir risk var." dedi."[35]
- 25 Şubat 2010 günü,[36], ABD Hava Kuvvetleri GPS konumlama sinyallerinin doğruluğunu ve kullanılabilirliğini artırmak ve GPS yenileştirilmesinin önemli bir parçası olarak hizmet verecek GPS Yeni Nesil Operasyonel Kontrol Sistemini (OCX) geliştirmek için bir sözleşme imzaladı.
Temel GPS kavramı

Bir GPS alıcısı Dünyanın yükseklerinden GPS uyduları tarafından gönderilen hassas zamanlama sinyalleri ile konumunu hesaplar. Her uydu sürekli GPS sinyali iletileri iletir ve:
- zaman iletisi iletilir ve dahasında
- mesaj iletimi sırasında uydu konumu bildirilir.
Alıcı her mesajın geçiş süresini belirlemek için aldığı iletileri kullanır ve ışık hızını kullanarak her uyduya olan mesafeyi hesaplar. Bu uzaklıkları ve uydusunun konumlarını her bir kürede tanımlar. Bu uzaklıklar ve uydusunun konumları konumlama denklemleri kullanılarak alıcının konumunu hesaplamak için kullanılır. Bu konum sonra belki hareketli bir harita ekranında veya enlem ve boylam ile gösterilir; yükseklik verisi ya da yükseklik bilgisi jeoidin (örneğin EGM96) yukarıdaki yüksekliğine göre dâhil edilebilir.
Temel GPS ölçümleri sadece bir konumun ne hız ne de yönünü verir. Ancak, çoğu GPS cihazıyla otomatik olarak iki veya daha fazla konumun ölçümleriyle konumun hızını ve hareket yönünü elde edebilirsiniz. Bu ilkenin sakıncası, hız veya yön değişikliğinin yalnızca bir gecikmeyle hesaplanarak elde edilebilmesidir, ve elde edilen yön uzaklığı ise iki konumun ölçümleri arasında seyahat ederken hatalı olmasıdır, altında veya yakınındaki konumun ölçümü rastgele hataya düşer. GPS cihazıyla doğru hızını hesaplamak için sinyallerin doppler kayması ölçümlerini kullanabilirsiniz.[37] Daha gelişmiş konumlandırma dizgeleri GPS'i tamamlayacak bir pusula ya da ataletsel konumlandırma sistemi gibi ek algılayıcılarda kullanır.
Temel bir GPS sinyal alımı işleminde, dört veya daha fazla uydu doğru bir sonuç elde etmek için görünür olmalıdır. Gezinme denklemlerin çözümü böylece daha doğru ve muhtemelen elverişsiz alıcı esaslı saat için ihtiyacı ortadan kaldırarak, alıcının yerleşik saat ve gerçek zaman günü tarafından tutulan saat arasındaki farkı ile birlikte alıcının konumu belirtir. Bu zaman aktarımı trafik sinyal zamanlaması, ve cep telefonu baz istasyonları senkronizasyonu gibi GPS uygulamaları için bu ucuz ve son derece hassas zamanlamadan yararlanabilir.
Dört uydu normal çalışması için gerekli olmakla birlikte, daha azıda özel durumlarda geçerli olabilir. Bir değişkeni zaten biliniyorsa, bir alıcı ile sadece üç uydu kullanılarak konum belirlenebilir. Örneğin, bir gemi veya uçak yüksekliği bilinenlerden olabilir. Bazı GPS alıcıları bilinen son rakımın yeniden kullanılması gibi ilâve ipuçları ya da parekete hesabı, ataletsel konumlama, veya dâhili olarak ilâve ipuçları ya da varsayımlarını kullanabilir.[38][39][40]
Yapısı
Geçerli GPS üç ana parçadan oluşur. Bunlar, uzay bölümü (SS - space segment), kontrol bölümü (CS - control segment) ve bir kullanıcı bölümüdür (US - user segment).[41] ABD Hava Kuvvetleri, uzay ve kontrol bölümlerini çalıştırır, geliştirir ve korur. GPS uyduları uzayda gönderilen sinyallerin yayını gerçekleştirir ve her GPS alıcısı kendi üç boyutlu konumunu (enlem, boylam ve yükseklik) ve anlık zamanı hesaplamak için bu sinyalleri kullanır.[42]
Uzay bölümü orta Dünya yörüngesinde 24 ile 32 uydudan oluşan ve aynı zamanda yörüngeye bunları başlatmak için gerekli arttırıcı yükü ile adaptörleri içerir. Kontrol bölümü bir ana yönleme istasyonu, başka bir ana yönleme istasyonuna ve adanmış ve ortak zemin antenleri ve görüntüleme istasyonlarının bir dizisinden oluşur. Kullanıcı kesimi ise Standart Konumlama Hizmeti sivil, ticari ve bilimsel kullanıcılar (GPS cihazlarına bakınız) ABD'nin yüz binlerce güvenli GPS Hassas Konumlandırma Hizmetini alan müttefik askeri kullanıcıları ve sivil milyonlarca kullanıcısından oluşur.
Uzay bölümü

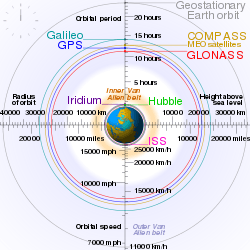
Uzay bölümü, en az 24 uydudan (18 aktif 6 yedek) oluşur ve sistemin merkezidir. Uydular, "Yüksek Yörünge" adı verilen ve dünya yüzeyinin 20.000 km üzerindeki yörüngede bulunurlar. Bu kadar fazla yükseklikte bulunan uydular oldukça geniş bir görüş alanına sahiptirler ve dünya üzerindeki bir GPS alıcısının her zaman iki boyutlu belirleme için en az 3, üç boyutlu belirleme için en az 4 adet uyduyu görebileceği şekilde yerleştirilmişlerdir.
Uydular saatte 7.000 mil hızla hareket ederler ve 12 saatte, dünya çevresinde bir tur atarlar. Güneş enerjisi ile çalışırlar ve en az 10 yıl kullanılmak üzere tasarlanmışlardır. Ayrıca güneş enerjisi kesintilerine karşı (güneş tutulması vs.) yedek bataryaları ve yörünge düzeltmeleri için de küçük ateşleyici roketleri vardır.
GPS projesi ilk uydunun 1978'de ateşlenmesiyle başlamıştır. 24 uyduluk ağ 1994'de tamamlanmıştır. Projenin devamlılığı ve geliştirilmesi ile ilgili bütçe ABD Savunma Bakanlığı'na aittir.
Uyduların her biri, iki değişik frekansta ve düşük güçlü radyo sinyalleri yayınlamaktadır. (L1, L2) Sivil GPS alıcıları L1 (UHF bandında 1575,42 MHz) ve L2 (1227,60 Mhz) frekanslarını dinlemektedirler. Birden fazla sinyalin kullanılması hem iyonesferden dolayı gerçekleşen kırılmayı engellemek hem de sinyal bozma durumlarına karşı güvenlik olarak uygulanmaktadır. ABD Savunma bölümü alıcıları Military (M-code) (5.115 MHz.) frekansını dinlemektedirler. Bu sinyaller "Görüş Hattında" Line of Sight ilerler. Yani bulutlardan, camdan ve plastikten geçebilir ancak duvar ve dağ gibi katı cisimlerden geçemez.
GPS sinyalleri binalardan yansıdığı için şehir içlerinde araziye oranla hassasiyeti azalır. Yeraltına kazılan tünellerde ise sinyal elde edilemez. Hatalı sinyallerin elde edilebileceği ya da hiç sinyal elde edilemeyen bölgelerde kullanılmak üzere geliştirilen Diferansiyel GPS'ler tarafından bu hatalar en aza indirilerek daha hassas bir yer ölçümü yapılabilir.
GPS Frekansları Bant Frekans
(MHz)Faz Özgün Kullanımı Çağcıl Kullanımı L1 1575.42
10.23×154Eş Fazlı (I) Şifrelenmiş Kesinlik P(Y) kodu Dördün-
Faz (Q)Kaba-edinim (C/A) kodu C/A, L1 Sivil (L1C), ve
Askeri (M) kodL2 1227.60
10.23×120Eş Fazlı (I) Şifrelenmiş Kesinlik P(Y) kodu Dördün-
Faz (Q)Modüle edilmemiş taşıyıcı L2 Sivil (L2C) kod ve
Askeri (M) kodL3 1381.05
10.23×135Nükleer Patlama için kullanılır (NUDET)
Algılama Dizgesi Faydalı yükü (NDS);
nükleer detonasyon sinyalleri/
yüksek enerjili kızılötesi olaylar.
Nükleer deneme yasağı antlaşmaları
uygulamak için kullanılır.L4 1379.913
10.23×1214/9(İletim yok) Ek için çalışılan
iyonosfer kaynaklı düzeltmeL5 1176.45
10.23×115Eş Fazlı (I) (İletim yok) Safety-of-Life (SoL) Veri sinyali Dördün-
Faz (Q)Safety-of-Life (SoL) Pilot sinyal
Daha rahat anlaşılması için, bildiğimiz radyo istasyonu sinyalleri ile L1 frekansını kıyaslamak istersek; FM radyo istasyonları 88 ile 108 Mhz arasında yayın yaparlar, L1 ise 1575,42 Mhz'i kullanır. Ayrıca GPS'in uydu sinyalleri çok düşük güçtedirler. FM radyo sinyalleri 100.000 watt gücünde iken L1 sinyali 20-50 watt arasındadır. Bu yüzden GPS uydularından temiz sinyal alabilmek için açık bir görüş alanı gereklidir.
GPS uyduları tarafından gönderilen elektromanyetik dalgalar atmosferden geçerken bükülmeye uğrarlar. L1 ve L2 bantları farklı dalga boylarına sahip olduğundan farklı oranda bükülmeye uğradığından aradaki farklılık hesaplanarak atmosferik bozulma engellenerek çok daha hassas bir yer bilgisi hesaplanabilir. Sadece L1 bandı kullanılarak (diferansiyel GPS ile dahi) 98 m. hassasiyet elde edilebilirken, L1 ve L2 bantlarının ortak kullanımı ile 1 m.'nin altında hassasiyete ulaşmak mümkün olmaktadır.
Her uydu yerdeki alıcının sinyalleri tanımlamasını sağlayan iki adet özel pseudo-random (şifrelenmiş rastgele kod) kodu yayınlar. Bunlar Korumalı (Protected P code) kod ve Coarse/Acquisition (C/A code) kodudur. P kodu karıştırılarak sivil izinsiz kullanımı engellenir, bu olaya Anti-Spoofing adı verilir. P koduna verilen başka bir isimde "P (Y)" ya da sadece "Y" kodudur.
Bu sinyallerin ana amacı yerdeki alıcının, sinyalin geliş süresini ölçerek, uyduya olan mesafesini hesaplamayı mümkün kılmasıdır. Uyduya olan mesafe, sinyalin geliş süresi ile hızının çarpımına eşittir. Sinyallerin kabul edilen hızı ışık hızı dır. Gelen bu sinyal, uydunun yörünge bilgileri ve saat bilgisi, genel sistem durum bilgisi ve iyonosferik gecikme bilgisini içerir. Uydu sinyalleri çok güvenilir atom saatleri kullanılarak zamanlanır.
Kontrol Bölümü

Adından da anlaşılacağı gibi, Kontrol Bölümü, GPS uydularını sürekli izleyerek, doğru yörünge ve zaman bilgilerini sağlar. Dünya üzerinde 5 adet kontrol istasyonu bulunmaktadır (Hawaii, Kwajalein, Colorado Springs (ana merkez), Ascension adası ve Diego Garcia). Bunlardan dördü insansız, biri insanlı ana kontrol merkezidir. İnsansız kontrol merkezleri, topladıkları bilgileri ana merkeze yollarlar. Ana merkezde bu bilgiler değerlendirilerek gerekli düzeltmeler uydulara bildirilir.
Kullanıcı bölümü
Kullanıcı bölümü yerdeki alıcılardır. Çeşitli amaçlarla GPS kullanarak yerini belirlemek isteyen herhangi bir kişi, sistemin kullanıcı bölümüne dahil olur. Bu bölüm kullanıcılara sunulan uygulamaya ait donanım ve hesaplama tekniklerinin geniş bir aralığını tanımlar. Gerek askeri gerekse sivil kullanıcılar için teknolojinin gelişmesi ile beraber büyük bir ilerleme göstermiştir. Genel olarak her türlü amaç için farklı duyarlıkları olan uygun donanımlı GPS alıcıları (receiver) bu bölümü oluşturur. Bir GPS alıcısı; algılayıcı (sensor), kontrol ünitesi, alıcı anteni ve güç kaynağından oluşur. Ölçü sırasında
- Anlık faz farkı ölçüleri (data, ham ölçüleri)
- Yayın efemerisi bilgileri (uydu yörünge bilgileri)
- Atmosferik bilgiler (iyonosfer ve troposfer bilgileri)
- Mesaj bilgileri(anten yüksekliği ve nokta bilgileri)
elde edilir. Jeodezik amaçla GPS ölçülerinde kullanılan iki çeşit alıcı vardır.
Uygulama alanları
Aslında askeri bir proje iken, GPS'nin, önemli askeri ve sivil uygulamaları vardır, yani bir çift kullanımlı teknoloji olarak kabul edilir.
GPS ticaret, bilimsel kullanım, izleme ve gözetim için yaygın olarak dağıtılan ve kullanışlı olan bir araç haline gelmiştir. GPS doğru bir zaman kesinliğinde iyi eşitlenmede el-dışı anahtarlama vererek bankacılık, cep telefonu işlemleri ve enerji ağları hatta kontrolü gibi günlük etkinlikleri kolaylaştırır.[42]
Sivil

Mutlak konum, bağıl hareket ve zaman aktarımı için: birçok sivil uygulamanın birini veya GPS üç temel bileşenini daha kullanır.
- Astronomi: konumsal olarak hem saat eşgüdümleme verileri hem de Astrometri ve Gök mekaniği hesaplamalarında kullanılır.
Ayrıca gezegen bulunmasında kullanılırken, örneğin, gözlemevleri uzmanları küçük teleskoplar kullanırken amatör astronomide yardımcı olarak GPS kullanmaktadır.
- Otomatikleştirilmiş araç: otomobiller ve diğer taşıtlar için yer ve yolları bir sürücüsü olmadan çalışması için uygulamada kullanılmaktadır.
- Haritacılık: hem sivil hem de askeri haritacılar yoğun GPS kullanmaktadır.
- Hücresel telefon: saat eşgüdümlemesi, hücreler arası yayınımı kolaylaştırmak ve mobil acil aramalar ve diğer uygulamalar için hibrid GPS / hücresel konum algılaması destekleyen diğer baz istasyonları ile yayılma kodlarını eşitlemek için kritik zaman transferini sağlamada kullanılmaktadır. 1990'ların sonlarında başlatılan tümleşik GPS ile ilk telefonlarda kullanılmıştır. ABD Federal İletişim Kurulu (FCC) 911'i arayanları daha hızlı bulmak için bu yüzden 2002'de acil servislerde (nirengi kullanım için) ya el cihazında ya da kulelerde özelliği zorunlu tutulmuştur. Üçüncü şahıs yazılım geliştiricilerinin daha sonraki, duyuruları sırasında Nextel GPS API'leri erişim kazandı, kısa bir süre sonra 2006 yılında Sprint ve Verizon bunu izledi.
- Saat eşgüdümlemesi: GPS zaman sinyallerinin (± 10 ns)[43] doğruluğu yalnızca ikinci bir dayanak olarak atom saatlerine bağlıdır.
- Afet yardımı / acil hizmetler: konum ve zamanlama yetenekleri için GPS'e bağlıdır.
- Meteoroloji-Üst Rüzgâr: ölçümlerinde dünya yüzeyinden 27 km yukarıya doğru atmosferik basıncın, rüzgar hızının ve yönünün hesaplanmasında kullanılmaktadır.
- Filo Takibi: GPS teknolojisinin kullanılması ile takip edilecek araçları tanımlamak ve gerçek-zamanlı olarak bir veya daha fazla filo aracının iletişim raporlarını sürdürmek için kullanılmaktadır.
- Araştırma: En pahalı GPS alıcıları haritacılar tarafından sınırların, yapıların, harita işaretlerinin konum tespiti ve yol yapım çalışmaları için kullanılmaktadır.
- Görme engelliler için: 1980'lerin sonlarına doğru uygulamaya giren GPS ile birlikte “MoBIC, Drishti, Brunel Navigation System for the Blind, NOPPA, BrailleNote GPS and Trekker” isimli projeler yürütülmeye başlamıştır.
- Havacılık: GPS uçaklarda da diğer yön bulma aygıtlarına ek olarak kullanılmaktadır. Bazı firmalar yolcuların el tipi GPS alıcılarını kullanmalarına izin vermemektedir.
- Referans saat: Birçok sistem senkronizasyon için referans saat kaynağı olarak GPS saatini kullanmaktadır. GPS sistemi, UTC ve GMT'den farklı olarak kendi uyduları üzerindeki atom saatlerini kullanmaktadır. Bunlar 6 Haziran 1980'de sıfırlanmış ve artık saniye düzeltmesi yapılmadığı için UTC'den 14 saniye ileridedirler. Bu nedenle periyodik olarak GPS alıcılarına UTC saat bilgisi gönderilir.
- Geofence: araç takip sistemleri, kişi izleme sistemleri ve hayvan izleme sistemlerinde araç, kişi ya da evcil hayvanı bulmak için GPS kullanabilirsiniz.
- Coğrafi Etiketleme: konumunu uygulayarak Nikon'un GP-1 benzeri cihazları ile harita kaplamaları oluşturmak gibi amaçlarla (Exif verilerine) fotoğraf gibi sayısal nesneler ve diğer belgelerin koordinatlarını belirtmede kullanılır.
- GPS Uçak takibi
- Madencilik için GPS: Gerçek Zamanlı Kinematik GPS (Real Time Kinematic GPS) kullanımı ile önemli ölçüde sondaj, kürekleme, araç takibi ve ölçme gibi çeşitli madencilik işlemlerinde geliştirilmiştir. RTK GPS santimetre düzeyinde konumlandırma hassasiyeti sağlar.
- GPS turları: konumun içeriğinin görüntülenmesi için; Örneğin, ilgili yaklaşan kişinin hareketli bir noktası hakkında bilgi.
- Konumlama: seyrüsefer değerinin sayısal olarak hassas hız ve yönelim ölçümlerinde kullanılır.
- Fazörlerle ölçümler: GPS sayesinde fazörlerle hesaplama yapmak için güç sistemi ölçümlerinde son derece doğru zaman damgası özelliği sağlar.
- Dinlenme: örneğin, yer önbellek özelliği, geodashing, GPS çizim ve yol işaretleme için kullanılır.
- Robot bilimi: Enlem, boylam, zaman, hız ve rotayı hesaplamakta GPS sensörleri ile otonom robotların seyirinde kullanılır.
- Spor: Eğitim yükünün kontrol ve çözümlenmesinde (örneğin futbol ve rugby için) kullanılır.
- Yer Ölçümü: bilirkişileri haritalar yapmak ve mülkiyet sınırlarını belirlemek için mutlak konumları kullanmaktadır.
- Tektonik: GPS depremlerde doğrudan yer kabuğunda meydana gelen değişimleri belirlemede kullanılır.
- Akıllı seyir sistemleri: otomobil seyir sistemleri, bilgisayar ve mobil iletişim teknolojisi ile tümleşik GPS teknolojisi kullanılır.
Sivil kullanım kısıtlamaları
ABD Hükümeti, bazı sivil alıcıları ihracatını kontrol eder. Örneğin insansız hava araçları gibi bir kullanım için değiştirilmiş (18 kilometre (11 mil) yükseklikte ve 515 saniye (1,001 kn) ortalama metre) veya tasarlanan yukarıdaki işleyen yeteneğine sahip tüm GPS alıcıları, balistik veya seyir füze sistemleri Dışişleri Bakanlığı ihracat lisanslarına bağlı olduğu için mühimmat (silah) olarak sınıflandırılır.[44]
Bir kural olarak yalnızca L1 frekansı ve C / A (Kaba/Edinim) kodu almak tamamen sivil birimler için geçerlidir.
Bu sınırların üzerinde devre dışı bırakma işlemi cephane olarak sınıflandırmadan dolayı alıcıyı muaf tutar. Satıcı yorumlanması farklıdır. Bu kural hedef yükseklikte ve hızda çalışması anlamına gelir ancak bazı alıcılar çalışmaya devam eder. Bu düzenli olarak 30 kilometreye ulaşması, bazı amatör radyo balon duyurularıyla beraber sorunlara sebep olmuştur. Bu sınırlar, yalnızca ABD ihraç birimlerine uygulamaktadır, açıkça ITAR-özgür olarak satılan diğer ülkeler tarafından sağlanan GPS birimleri de dahil olmak üzere çeşitli bileşenlerin, büyüyen bir ticareti vardır.
Askeri
GPS seyir füzelerinde (kıtalar arası füzelerde) ve hassas güdümlü füzelerde kullanılmaktadır. Balistik füzelere de de fırlatma pozisyonunun daha doğru olarak hesaplanması için kullanılmaktadır. Ayrıca Amerikan Nükleer Patlama Gözlemleme Sisteminin büyük bir parçası olarak GPS uyduları nükleer patlama dedektörleri içerir.
Türk Silahlı Kuvvetleri de izlediği savunma politikasına paralel olarak birçok alanda GPS uygulamalarından yararlanmaktadır. Örnek olarak komando birlikleri intikal, travers, arazide yön bulma gibi birçok alanda GPS kullanmaktadır.
- Arama ve Kurtarma: Düşen pilotlar daha hızlı pozisyon biliniyorsa bulunabilir.
- Keşif: Devriye hareketi daha yakından idare edilebilir.
İletişim
GPS uyduları tarafından iletilen seyir sinyalleri, içsel saatlerin durumu, ağ sağlığı ve uydu pozisyonları da dahil olmak üzere çeşitli bilgileri kodlamaktadır. Bu sinyaller, ağdaki tüm uydular için ortak olan iki ayrı taşıyıcı frekans üzerinden aktarılır. İki farklı kodlama kullanılır: düşük çözünürlüklü navigasyon sağlayan bir kamu kodlaması ve ABD ordusu tarafından kullanılan bir şifreli kodlama.
İleti biçimi
GPS ileti biçimi Alt çerçeveler Açıklaması 1 Uydu saati,
GPS zaman ilişkisi2–3 Efemeris
(kesin uydu yörüngesi)4–5 Almanak bileşeni
(uydu ağı özeti,
hata düzeltimi)
Her bir GPS uydusu sürekli olarak saniyede 50 bitlik (bit hızı bakınız) bir oranda, L1, C / A ve L2, S / Y frekanslarında bir seyir mesajını yayınlar. Her tamamlama mesajını tamamlamak için 750 saniye (12 1/2 dakika) sürer. İleti yapısı, 1500-bit uzunluğundaki çerçevenin temel biçiminde, her alt çerçeve, 300 bit uzunluğunda (6 saniye) olmak üzere beş alt çerçeveden oluşur. Tam bir veri iletisi 25 tam çerçevenin iletimini gerektirdiğinden, böylece alt çerçeveler 4 ve 5, 25 kez alt komütasyonlu olur. Her alt çerçeve, her biri 30 bit uzunluğunda on kelimeden oluşur. Bu nedenle, bir alt-kat olarak 300 bitlik bir çerçeve içinde 5 alt-çerçeve, bir mesajı 25 kare, her bir mesajı 37500 bit uzunluğundadır. 50 bit / saniyelik bir iletim oranında bütün almanak mesajını (GPS) iletmek 750 saniye sürer. Her 30 saniyelik çerçeve dakikasında veya her uydunun üzerinde atom saati ile gösterilen şekilde yarım dakika üzerinde tam olarak başlar.
Her çerçevenin ilk alt çerçevesi hafta numarasını ve hafta içinde zamanın, yanı sıra uydu sağlığı ile ilgili verileri kodlar.[45] Uydu için hassas yörünge - ikinci ve üçüncü alt çerçeveler ephemerisi içerirler. Dördüncü ve beşinci alt çerçeveler kaba yörünge ve Almanak bileşenini yani uydu ağı özetini ve hata düzeltimini içerirler. Bu durumda, alıcı, 18-30 saniye boyunca çözüm içinde her bir uydudan gelen mesajı demodüle ederek gereken bu iletilen mesajını doğru olan bir uydu konumunu elde etmek için kullanır. Tüm iletilen almanakları toplamak amacıyla alıcının 732-750 saniye veya 12 1/2 dakika mesajı demodüle etmesi gerekmektedir.
Tüm uydular aynı frekanslarda yayın yaparlar. Sinyaller bireysel uydulardan gelen mesajları, her uydunun (alıcı farkında olması gerektiğini) benzersiz kodlamalara dayalı birbirinden ayırt edilmesi için kod bölmeli çoklu erişim (CDMA) kullanılarak kodlanmıştır. CDMA kodlamalarının iki farklı türleri kullanılır: genel kamu tarafından erişilebilir olan, kaba / edinim (C / A) kodu, ve sadece ABD askeriyesince erişebilir hassas (P (E)) kodu.[46]
Efemeris her 2 saatte bir güncellenir ve nominal olmayan koşullarda güncellemeleri her 6 saatte bir veya daha uzun süre için hükümleri ile, genel olarak 4 saat için geçerlidir. Almanak genellikle her 24 saatte bir güncellenmektedir. Birkaç hafta için ek veriler veri yükleme gecikme iletim güncellemeleri halinde yüklenir.
| Alt çerçeve # | Sayfa # | Adı | Sözcük # | Bitleri | Ölçeği | İmzalı |
|---|---|---|---|---|---|---|
| 1 | tümü | Hafta sayısı | 3 | 1–10 | 1:1 | Hayır |
| 1 | tümü | L2 üzerinde CA veya P | 3 | 11,12 | 1:1 | Hayır |
| 1 | tümü | URA Dizini | 3 | 13–16 | 1:1 | Hayır |
| 1 | tümü | SV Sağlığı | 3 | 17–22 | 1:1 | Hayır |
| 1 | tümü | IODC(MSB) | 3 | 23,24 | 1:1 | Hayır |
| 1 | tümü | L2P veri bayrağı | 4 | 1 | 1:1 | Hayır |
| 1 | tümü | ResW4 | 4 | 2–24 | Kullanılamaz | Kullanılamaz |
| 1 | tümü | ResW5 | 5 | 1–24 | Kullanılamaz | Kullanılamaz |
| 1 | tümü | ResW6 | 6 | 1–24 | Kullanılamaz | Kullanılamaz |
| 1 | tümü | ResW7 | 7 | 1–16 | Kullanılamaz | Kullanılamaz |
| 1 | tümü | TGD | 7 | 17–24 | 2^-31 | Evet |
| 1 | tümü | IODC (LSB) | 8 | 1–8 | 1:1 | Hayır |
| 1 | tümü | TOC | 8 | 9–24 | 2^4 | Hayır |
| 1 | tümü | AF2 | 9 | 1–8 | 2^-55 | Evet |
| 1 | tümü | AF1 | 9 | 9–24 | 2^-43 | Evet |
| 1 | tümü | AF0 | 10 | 1–22 | 2^-31 | Evet |
| Alt çerçeve # | Sayfa # | Adı | Sözcük # | Bitleri | Ölçeği | İmzalı |
|---|---|---|---|---|---|---|
| 2 | tümü | IODE | 3 | 1–8 | 1:1 | Hayır |
| 2 | tümü | CRS | 3 | 9–24 | 2^-5 | Evet |
| 2 | tümü | Delta N | 4 | 1–16 | 2^-43 | Evet |
| 2 | tümü | M0 (MSB) | 4 | 17–24 | 2^-31 | Evet |
| 2 | tümü | M0 (LSB) | 5 | 1–24 | ||
| 2 | tümü | CUC | 6 | 1–16 | 2^-29 | Evet |
| 2 | tümü | e (MSB) | 6 | 17–24 | 2^-33 | Hayır |
| 2 | tümü | e (LSB) | 7 | 1–24 | ||
| 2 | tümü | CUS | 8 | 1–16 | 2^-29 | Evet |
| 2 | tümü | root A (MSB) | 8 | 17–24 | 2^-19 | Hayır |
| 2 | tümü | root A (LSB) | 9 | 1–24 | ||
| 2 | tümü | TOE | 10 | 1–16 | 2^4 | Hayır |
| 2 | tümü | FitInt | 10 | 17 | 1:1 | Hayır |
| 2 | tümü | AODO | 10 | 18–22 | 900 | Hayır |
| Alt çerçeve # | Sayfa # | Adı | Sözcük # | Bitleri | Ölçeği | İmzalı |
|---|---|---|---|---|---|---|
| 3 | tümü | CIC | 3 | 1–16 | 2^-29 | Evet |
| 3 | tümü | Omega 0 (MSB) | 3 | 17–24 | 2^-31 | Evet |
| 3 | tümü | Omega 0 (LSB) | 4 | 1–24 | ||
| 3 | tümü | CIS | 5 | 1–16 | 2^-29 | Evet |
| 3 | tümü | i0 (MSB) | 5 | 17–24 | 2^-31 | Evet |
| 3 | tümü | i0 (LSB) | 6 | 1–24 | ||
| 3 | tümü | CRC | 7 | 1–16 | 2^-5 | Evet |
| 3 | tümü | Omega (MSB) | 7 | 17–24 | 2^-31 | Evet |
| 3 | tümü | Omega (LSB) | 8 | 1–24 | ||
| 3 | tümü | Omega Noktası | 9 | 1–24 | 2^-43 | Evet |
| 3 | tümü | IODE | 10 | 1–8 | 1:1 | Hayır |
| 3 | tümü | IDOT | 10 | 9–22 | 2^-43 | Evet |
Uydu frekansları
GPS frekansı genel bakışı Bant Frekans Açıklaması L1 1575.42 MHz Kaba-edinim (C/A) ve şifreli kesinlik (P(Y)) kodu, artı L1 sivil (L1C) ve askeri (M) kod gelecekteki Blok III uyduları üzerinde. L2 1227.60 MHz P(Y) kod, artı L2C ve Blok IIR-M ve yeni uyduların askeri kodları. L3 1381.05 MHz Nükleer patlama (NUDET) tespiti için kullanılır. L4 1379.913 MHz Ek iyonosfer kaynaklı düzeltme için çalışılmaktadır. L5 1176.45 MHz Bir sivil güvenlik ömrü (SoL) sinyali olarak kullanılmak üzere önerildi.
1,57542 GHz (L1 sinyali) ve 1,2276 GHz (L2 sinyali) aynı iki frekansta tüm uydular yayın yapar. Uydu ağı, düşük bit hızı mesaj verilerinin her bir uydu için farklı bir yüksek oranlı sözde rastgele (PRN) dizisi ile kodlanan bir CDMA yayılma spektrumlu tekniğini kullanır. Her uydu gerçek ileti verilerini yeniden alıcı için PRN kodlarının farkında olmalıdır. P kodu, ABD askeri kullanımı için, saniyede 10.230.000 çip ile iletilir ise C / A kodu, sivil kullanım için, saniyede 1.023.000 çip veriyle iletilir. Uydudan asıl dahili referans göreli etkilerini telafi etmek üzere 10,22999999543 MHz yeryüzündeki bu gözlemciler yörüngede vericiler açısından farklı bir zaman referansı algılarlar.[47][48] L2 taşıyıcısı sadece P kodu tarafından modüle edilir ise, L1 taşıyıcısı, C / A ve P kodları ile modüle edilir.[49]
Ayrıca bakınız
Notlar
- ↑ Yörünge süreleri ve hızları; 4π²R³ = T²GM ve V²R = GM, burada R = yörünge yarıçapı metre olarak, T = saniyede yörünge dönemi, V = yörünge hızı m/s olarak, G = yerçekimi sabiti ≈ 6.673×10−11 Nm²/kg², M = Yeryüzü kütlesi ≈ 5.98×1024 kg. verileri kullanılarak hesaplanmıştır.
- ↑ Yaklaşık olarak yörünge; Ay Dünya'ya en yakın konumda iken (363.104 km ÷ 42.164 km) 8.6 kez, en uzak (405.696 km ÷ 42.164 km) konumda iken 9.6 kez.
Kaynaklar
- ↑ "What is a GPS?". 23 Mayıs 2015 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20150523232144/http://www.loc.gov:80/rr/scitech/mysteries/global.html.
- ↑ National Research Council (U.S.). Committee on the Future of the Global Positioning System; National Academy of Public Administration (1995) (İngilizce). The Global Positioning System: A Shared National Asset: Recommendations for Technical Improvements and Enhancements. National Academies Press. s. 16. ISBN 0-309-05283-1. http://books.google.com/books?id=FAHk65slfY4C. Erişim tarihi: 16 Ağustos 2013., Bölüm 1, ss. 16
- ↑ "Factsheets: GPS Advanced Control Segment (OCX)". Losangeles.af.mil. 25 Ekim 2011. 28 Eylül 2015 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20150928221529/http://www.losangeles.af.mil/library/factsheets/factsheet.asp?id=18676. Erişim tarihi: 6 Kasım 2011.
- ↑ "Russia Launches Three More GLONASS-M Space Vehicles" (İngilizce). Inside GNSS. 23 Eylül 2015 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20150923035042/http://www.insidegnss.com/node/982. Erişim tarihi: 26 Aralık 2008.
- ↑ Astronautica Acta II, 25 (1956)
- ↑ "GPS and Relativity". Astronomy.ohio-state.edu. 14 Kasım 2015 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20151114135709/http://www.astronomy.ohio-state.edu/~pogge/Ast162/Unit5/gps.html. Erişim tarihi: 6 Kasım 2011.
- ↑ Guier, William H.; Weiffenbach, George C. (1997). "Genesis of Satellite Navigation" (İngilizce) (PDF). Johns Hopkins APL Technical Digest 19 (1): s. 178–181. http://www.jhuapl.edu/techdigest/td/td1901/guier.pdf.
- ↑ Steven Johnson (2010), Where good ideas come from, the natural history of innovation, New York: Riverhead Books
- ↑ Helen E. Worth and Mame Warren (2009). Transit to Tomorrow. Fifty Years of Space Research at The Johns Hopkins University Applied Physics Laboratory. http://space50.jhuapl.edu/pdfs/book.pdf.
- ↑ Catherine Alexandrow (Nisan 2008). "The Story of GPS". 1 Şubat 2015 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20150201185620/http://www.darpa.mil/WorkArea/DownloadAsset.aspx?id=2565.
- ↑ DARPA: 50 Years of Bridging the Gap. Nisan 2008. http://www.darpa.mil/about/history/first_50_years.aspx.
- ↑ Howell, Elizabeth. "Navstar: GPS Satellite Network". Space.com. 17 Mayıs 2015 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20150517082800/http://www.space.com:80/19794-navstar.html. Erişim tarihi: 14 Şubat 2013.
- ↑ Jerry Proc. "Omega". Jproc.ca. 11 Mayıs 2015 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20150511051016/http://www.jproc.ca:80/hyperbolic/omega.html. Erişim tarihi: 8 Aralık 2009.
- ↑ "Why Did the Department of Defense Develop GPS?". Trimble Navigation Ltd.. 18 Ekim 2007 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20071018151253/http://www.trimble.com/gps/whygps.shtml#0. Erişim tarihi: 13 Ocak 2010.
- ↑ "Charting a Course Toward Global Navigation". The Aerospace Corporation. 3 Eylül 2013, 01:01:18 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20021101215923/http://www.aero.org/publications/crosslink/summer2002/01.html. Erişim tarihi: October 14, 2013.
- ↑ "Overview Of The Global Positioning System And Current Or Planned Augmentations: Origins And Development Of The NAVSTAR GPS Program". National Academy of Sciences. 22 Mayıs 2015 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20150522213249/http://www.nap.edu/openbook.php?record_id=4920&page=145. Erişim tarihi: 14 Ocak 2010.
- ↑ "A Guide to the Global Positioning System (GPS) — GPS Timeline". Radio Shack. 28 Mart 2015 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20150328034129/http://support.radioshack.com:80/support_tutorials/gps/gps_tmline.htm. Erişim tarihi: 14 Ocak 2010.
- ↑ "SECOR" (İngilizce) (PDF). NASA, ntrs.nasa.gov. http://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/19660002550_1966002550.pdf.
- ↑ "SECOR Chronology". Mark Wade's Encyclopedia Astronautica. 24 Ağustos 2015 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20150824112237/http://www.astronautix.com/craft/secor.htm. Erişim tarihi: 16 Ekim 2013.
- ↑ "MX Deployment Reconsidered." Erişim: 7 Haziran 2013.
- ↑ Michael Russell Rip, James M. Hasik (2002). The Precision Revolution: GPS and the Future of Aerial Warfare. Naval Institute Press. s. 65. ISBN 1-55750-973-5. http://books.google.com/?id=mB9W3H90KDUC. Erişim tarihi: 14 Ocak 2010.
- ↑ "ICAO Completes Fact-Finding Investigation". 27 Eylül 2011 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20110927014036/http://www.icao.int/cgi/goto_m.pl?icao/en/trivia/kal_flight_007.htm. Erişim tarihi: September 15, 2008.
- ↑ "United States Updates Global Positioning System Technology". 3 Şubat 2006. http://www.america.gov/xarchives/display.html?p=washfile-english&y=2006&m=February&x=20060203125928lcnirellep0.5061609.
- ↑ "GPS & Selective Availability Q&A". . 29 Mart 2012 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20120329111058/http://ngs.woc.noaa.gov/FGCS/info/sans_SA/docs/GPS_SA_Event_QAs.pdf. Erişim tarihi: 28 Mayıs 2010.
- ↑ "GPS Modernization". 14 Mart 2013. 19 Ekim 2013 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20131019072248/http://www.space.commerce.gov/gps/modernization.shtml. Erişim tarihi: 19 Ekim 2013.
- ↑ E. Steitz, David. "NATIONAL POSITIONING, NAVIGATION AND TIMING ADVISORY BOARD NAMED". 28 Şubat 2014 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20140228141906/http://www.nasa.gov:80/home/hqnews/2007/mar/HQ_07071_National_PNT_Advisory_Board.txt. Erişim tarihi: 22 Mart 2007.
- ↑ GPS Wing Reaches GPS III IBR Milestone InsideGNSS, 10 Kasım 2008
- ↑ "GPS almanacs". 1 Haziran 2015 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20150601234407/http://www.navcen.uscg.gov:80/?pageName=gpsAlmanacs.
- ↑ National Archives and Records Administration. U.S. Global Positioning System Policy. 29 Mart 1996.
- ↑ "National Executive Committee for Space-Based Positioning, Navigation, and Timing". Pnt.gov. 23 Temmuz 2012 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20120723045039/http://www.pnt.gov/. Erişim tarihi: 15 Ekim 2010.
- ↑ "Assisted-GPS Test Calls for 3G WCDMA Networks". 3g.co.uk. 10 Kasım 2004. 2 Mayıs 2015 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20150502073329/http://www.3g.co.uk:80/PR/November2004/8641.htm. Erişim tarihi: 24 Kasım 2010.
- ↑ "First Modernized GPS Satellite Built By Lockheed Martin Launched". Phys.org. 1 Mayıs 2015 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20150501065220/http://phys.org/news6762.html. Erişim tarihi: September 26, 2005.
- ↑ This story was written by 010907 (September 17, 2007). "losangeles.af.mil". losangeles.af.mil. 22 Kasım 2015 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20151122100306/http://www.losangeles.af.mil/news/story.asp?id=123068412. Erişim tarihi: October 15, 2010.
- ↑ Johnson, Bobbie (19 Mayıs 2009). "GPS system 'close to breakdown'". The Guardian (Londra). http://www.guardian.co.uk/technology/2009/may/19/gps-close-to-breakdown. Erişim tarihi: 8 Aralık 2009.
- ↑ Coursey, David (21 Mayıs 2009). "Air Force Responds to GPS Outage Concerns". ABC News. http://abcnews.go.com/Technology/AheadoftheCurve/story?id=7647002&page=1. Erişim tarihi: 22 Mayıs 2009.
- ↑ "Contract Award for Next Generation GPS Control Segment Announced". 21 Eylül 2013 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20130921223115/http://www.losangeles.af.mil/news/story_print.asp?id=123192234. Erişim tarihi: 14 Aralık 2012.
- ↑ Grewal, Mohinder S.; Weill, Lawrence R.; Andrews, Angus P. (2007). Global Positioning Systems, Inertial Navigation, and Integration. 2.. John Wiley & Sons. s. 92–93. ISBN 0-470-09971-2. http://books.google.com/books?id=6P7UNphJ1z8C., 92.–93. sayfalarından
- ↑ Georg zur Bonsen, Daniel Ammann, Michael Ammann, Etienne Favey, Pascal Flammant (1 Nisan 2005). "Continuous Navigation Combining GPS with Sensor-Based Dead Reckoning". GPS World. 11 Kasım 2006 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20061111202317/http://www.gpsworld.com/gpsworld/article/articleDetail.jsp?id=154870&pageID=6.
- ↑ "NAVSTAR GPS User Equipment Introduction" (PDF). United States Government. 21 Ekim 2013 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20131021060507/http://www.navcen.uscg.gov/pubs/gps/gpsuser/gpsuser.pdf. Bölüm 7
- ↑ "GPS Support Notes" (PDF). 19 Ocak 2007. 27 Mart 2009 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20090327051208/http://www.navmanwireless.com/uploads/EK/C8/EKC8zb1ITsNwDqWcqLQxiQ/Support_Notes_GPS_OperatingParameters.pdf. Erişim tarihi: 10 Kasım 2008.
- ↑ John Pike. "GPS III Operational Control Segment (OCX)". Globalsecurity.org. 5 Eylül 2015 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20150905195818/http://www.globalsecurity.org/space/systems/gps_3-ocx.htm. Erişim tarihi: 14 Ağustos 2014.
- 1 2 "Global Positioning System". Gps.gov. 18 Mayıs 2012 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20120518042020/http://www.gps.gov:80/systems/gps/index.html. Erişim tarihi: 26 Haziran 2010.
- ↑ "Common View GPS Time Transfer". nist.gov. 28 Ekim 2012 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20121028043917/http://tf.nist.gov/time/commonviewgps.htm. Erişim tarihi: 23 Temmuz 2011.
- ↑ Arms Control Association.Missile Technology Control Regime. Erişim 17 Mayıs 2006.
- ↑ Peter H. Dana. "GPS Week Number Rollover Issues". 7 Mayıs 2015 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20150507224243/http://www.colorado.edu:80/geography/gcraft/notes/gps/gpseow.htm. Erişim tarihi: 12 Ağustos 2013.
- ↑ Richharia, Madhavendra; Westbrook, Leslie David (2011). Satellite Systems for Personal Applications: Concepts and Technology. John Wiley & Sons. s. 443. ISBN 1-119-95610-2. http://books.google.com/books?id=MqPQ5CbgQ48C., Extract of page 443
- ↑ Misra, Pratap; Enge, Per (2006). Global Positioning System. Signals, Measurements and Performance. 2nd. Ganga-Jamuna Press. s. 115. ISBN 0-9709544-1-7. http://books.google.com/books?id=pv5MAQAAIAAJ. Erişim tarihi: 16 Ağustos 2013.
- ↑ Borre, Kai; M. Akos, Dennis; Bertelsen, Nicolaj; Rinder, Peter; Jensen, Søren Holdt (2007). A Software-Defined GPS and Galileo Receiver. A single-Frequency Approach. Springer. s. 18. ISBN 0-8176-4390-7. http://books.google.com/books?id=x2g6XTEkb8oC.
- ↑ How GPS works. Konowa.de (2005).
- GPS dispatch systems (İngilizce)
Ek okumalar
- Parkinson; Spilker (1996). The global positioning system. American Institute of Aeronautics and Astronautics. ISBN 978-1-56347-106-3. http://books.google.com/?id=lvI1a5J_4ewC.
- Jaizki Mendizabal; Roc Berenguer; Juan Melendez (2009). GPS and Galileo. McGraw Hill. ISBN 978-0-07-159869-9. http://books.google.com/?id=t1lBTH42mOcC&printsec=frontcover&dq=GPS+and+GALILEO#v=onepage&q&f=false.
- Nathaniel Bowditch (2002). The American Practical Navigator – Chapter 11 Satellite Navigation. United States government.
- Global Positioning System M.I.T.'den ücretsiz ders donanımı, 2012. (İngilizce)
Dış bağlantılar
- Küresel Konumlama Sistemi'nin çalışmasından sorumlu Schriever Hava Kuvvetleri Üssü – GPS Operasyonları Merkezi.
- Açık Dizin Projesi'nde GPS kategorisi
- FAA GPS FAQ
- GPS.gov—ABD Hükümeti tarafından oluşturulan GPS hakkında kamunun bilgilenimi için oluşturulmuş internet sitesi.
- USCG Navigation Center—GPS uydu takımı durumunu, hükümet politikası ve diğer başvuru bağlantılarını içeren; uydu almanak verileri.
- GPS Program Office (GPS Wing)—Amerika Birleşik Devletleri Hükümeti adına sistem tasarımı ve edinimi için sorumludur.
- ABD Ordusu, mühendislik için kılavuz: NAVSTAR HTML ve PDF (22.6 MB, 328 sayfa)
- National Geodetic Survey Küresel Uydu Konumlandırma Sistemi: GPS uyduları için yörüngeler.
- GPS PPS Performance Standard—Resmi Hassas Yerleştirme Servisi belirtimi.
- GPS and GLONASS Simulation (Java uygulaması) Duyarlılık seyreltme, (DOP - Dilution of Precision), hesaplama da dahil olmak üzere, uzay aracı hareketi grafik gösterimi ve simülasyon.